物流システム・マテハン機器等における今後の注目ポイント

物流システム・マテリアルハンドリング機器等の中で、いくつか今後注目されそうなポイントをまとめてみましたのでご紹介いたします。
ピックは進展してきたか?
ロボット等によりピッキング精度はこれまでもかなり進化してきています。画像認識により対象物を把握し、様々なアタッチメントでキャッチするといった点はこれまでの通りなのですが、そのキャッチの考え方に少し変化が出てきています。それは“ファーストトライでの成功を必ずしも求めない“といった点です。これまでは、1発でキャッチしようということが優先されていたようですが(今でもそうだと思います)、1回目うまく取れなければ、方法を変えて2回目で成功しようといったところです。
ピッキングロボットのMagazinoなども同様な考え方でピッキングの仕組みを開発していて、横倒しで保管しているスプレーボトルをわざと横にして拾わせると、1回目はボトルの蓋部分でうまく吸着できませんが、2回目以降(他の横倒しのものを先にピックして)は置かれた状況が変わった時点(他商品やロボットが触って再度横倒しになった時点で。つまり周辺の状況が変わり、ぶつかったりしてボトルが倒れて側面がロボットから見えるようになる)でピックします。
高精度を求めるよりも取れるときに、取れる状態でとろうということですね。ミスを受け入れて100%を求めない思想がよくわかります。人間もとり直しはよくありますから。
AGVが増えてきた?
確かに今回AGVが増えてきた感じはあります。それだけ、付加価値の低い搬送から人間を解放しようという思想のあらわれかもしれません。AutostoreやButlerのように人間を動かさない点に重点が置かれたシステムが昨今注目されてきました。これらは優れた仕組みではあるのですが、Eコマースや小物物流を中心とした比較的小型のものを対象にしたソリューションです。
一方大型のソリューションはというと、これといった決め手が出てきていないのが現状です。そこでまず真っ先に考え付くのがAGVや無人フォークでしょうか・・・・。これは、パレットやカゴ車搬送することで比較的大型のロットなどにも対応すべく見直されてきているのかもしれません。
そういった背景もあるのかGreyorangeがButler XLといった1600㎏のパレット対応のButlerまで発表していました。

写真 Butler XL
位置の認識や移動ってSLAMがよいか?
AGVや無人フォークなど、ガイドのない搬送機器については、レーザーが主流です。これまでロボット掃除機やDroneなどで利用されているSLAM技術の利用が進んでいるかと思いきやそれほど多くはありません。基本はレーザーによる検知が多い状況です。
その中でもEK Automationは薄型モーターを3つつけて前後、左右、回転を自在に動かして機動性を挙げているもの、WFTでは、本体部分のみが回転可能な構造(フォーク鞘部分は稼働せず本体だけ回転)にすることでスペース効率を挙げるなど様々なタイプが出てきています。ただし、SLAMはなし。これはコストUPになる点とSLAMでは情報処理の負荷が大きいことが考えられます。物流現場ではレーザーによる検知が向いているのかもしれません。
また、identplusは、3Dトラッキングをレーザーで行っている企業で、レーザーにより倉庫の中のどこに何が置かれているかをキャッチし、在庫管理、ロケーション管理を行うシステムが非常に面白いと思いました。このシステムでは、フォークの挙動もすべてキャッチし、フォーク側もアタッチメント側にセンサーを付属し、パレット情報を自動で読取り、何を抜き差ししたという情報を連携してどこのロケに何を置いたかが記録されていきます。これがあれば、データ入力などの行為を行うことなく、データが更新され倉庫内の状況がほとんど把握できる興味深い仕組みでした。
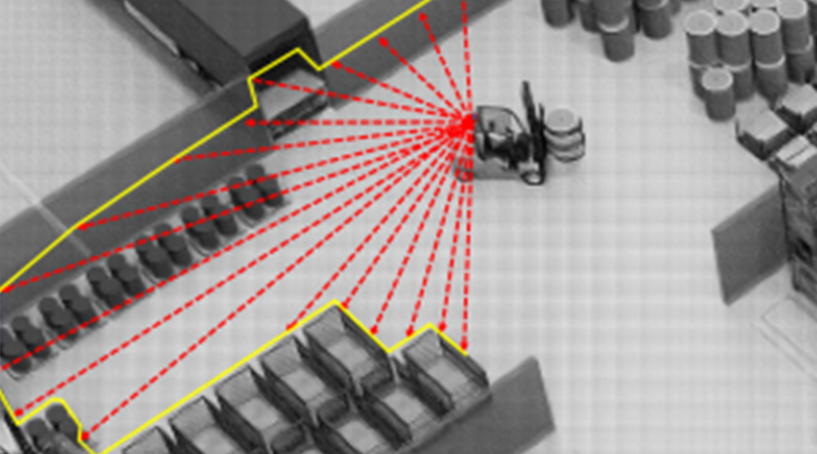
出典:Idenplus HPより

掲載記事・サービスに関するお問い合わせは
お問い合わせフォームよりご連絡ください

井上 文彦が書いた記事
-
ブログ / 1,282 views
 LogiMAT2023の視察レポート 第1弾
LogiMAT2023の視察レポート 第1弾2023年4月、ドイツのシュツットガルドで開催されたLogiMAT2023の視察報告。4年ぶりの海外展示会視察で感じたことをまとめます。キーワードは汎用性の高い…
-
ブログ / 2,877 views
 物流センターの自動化は課題を認識して優先順位をつけることから
物流センターの自動化は課題を認識して優先順位をつけることから物流センターの自動化は、どのように進めればよいのか…。まず川上系、川下系など物流のタイプ別に考え、課題を認識して優先順位をつけるところから始めます。
-
ブログ / 1,894 views
 北米最大マテハン・サプライチェーンショーProMAT2019!
北米最大マテハン・サプライチェーンショーProMAT2019!「プロマット2019」は北米最大のマテハン機器およびサプライチェーン関連の展示会です。「オートメート2019」も同時開催で、物流だけでなく自動化技術の最新情報が…
この記事の関連タグ
関連する記事
-
ブログ / 519 views
 アサーション:物流現場でも使えるコミュニケーションスキル
アサーション:物流現場でも使えるコミュニケーションスキル「アサーション」とは、「自分も相手も大切にする自己表現」で「自分の考え、欲求、気持ちを、率直に、その状況にあった適切な方法で伝えるスキル」です。 アサーションを…
-
ブログ / 1,448 views
 物流案件を進める上で必要なプロジェクト・マネジメント スキル
物流案件を進める上で必要なプロジェクト・マネジメント スキルプロジェクト・マネジメントに有効なスキルツール、主には①プロジェクト憲章、②コミュニケーション計画、③WBS(Work Breakdown Structure)…
-
ブログ / 822 views
 (物流2024年問題)ラストワンマイルデリバリー改革に向けたスモールスタート
(物流2024年問題)ラストワンマイルデリバリー改革に向けたスモールスタート「物流の2024年問題」を端に発し、政府、各物流関連団体などが連携した継続的な情報発信により露出も増え、物流事業者以外の企業、また、物流サービスのユーザーである…